Подключение рамп 1 4

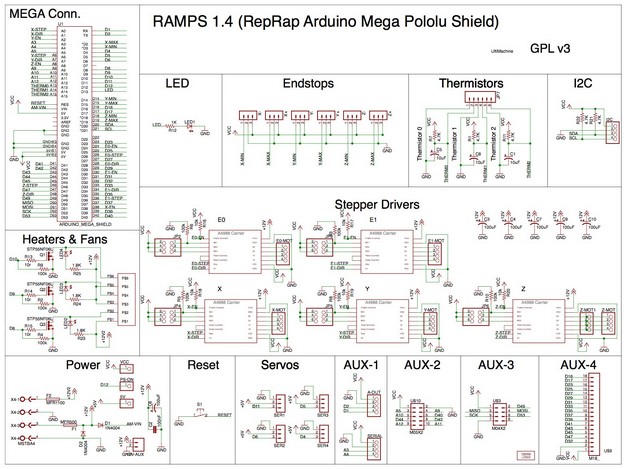
RAMPS — RepRap Arduino Mega Pololu Shield.
RAMPS 1.4 это шилд для Arduino MEGA 2560. Одевается поверх Arduino MEGA 2560 и все подключения, кроме USB, осуществляются через неё. Питание 12В на Arduino MEGA 2560 подаётся через RAMPS 1.4.

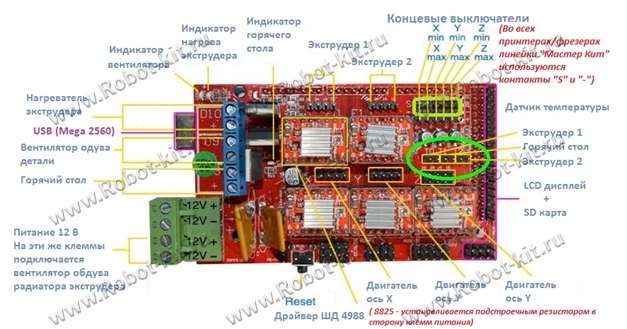
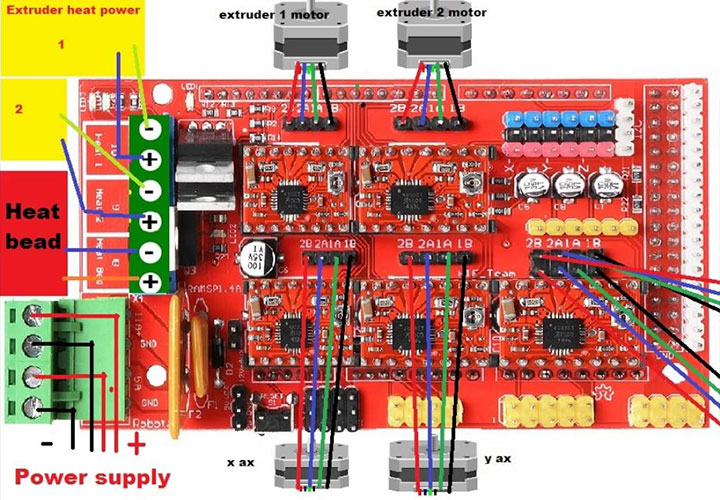
Типовая схема подключения.

Можно подключать два блока питания:

11А — на стол,
5А — на всё остальное Плюсы, через предохранители идут на клеммы вентилятора (D9 5A), нагревателя хотэнда (D10 5A) и стола (D8 11A). Управление осуществляется через минус (GND).
Чтобы подключить один БП, нужно соединить плюсы. Минусы уже общие.
Питание Arduino MEGA 2560 идёт от RAMPS. Чтобы Arduino MEGA 2560 питать от своего источника, нужно выпаять на RAMPS диод D1, который находится под драйверами шаговых двигателей X и Y, по середине.

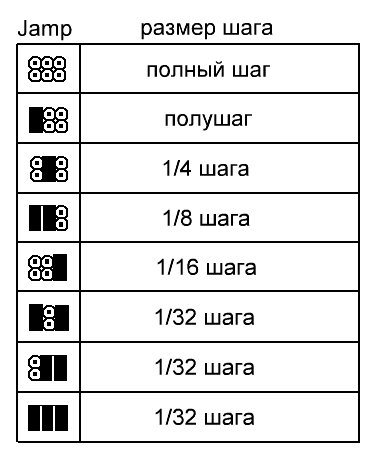
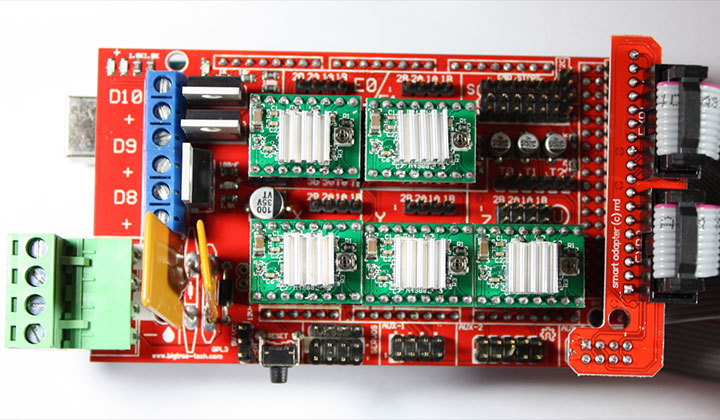
На плату могут быть установлены драйверы шаговых двигателей типа A4988 с минимальным микрошагом 1/16 или Drv8825 с минимальным микрошагом 1/32
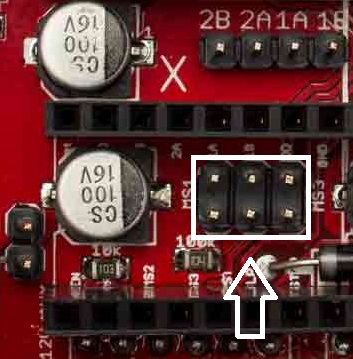
Прежде чем установить драйвера шд, необходимо выставить микрошаг драйвера, установив необходимуюкомбинацию джамперов, на разъеме, который находится под соответвующем драйвером.

Если используется драйвер A4988, то расположение перемычки будет таким:

Если используется драйвер Drv8825, то расположение перемычки будет таким:

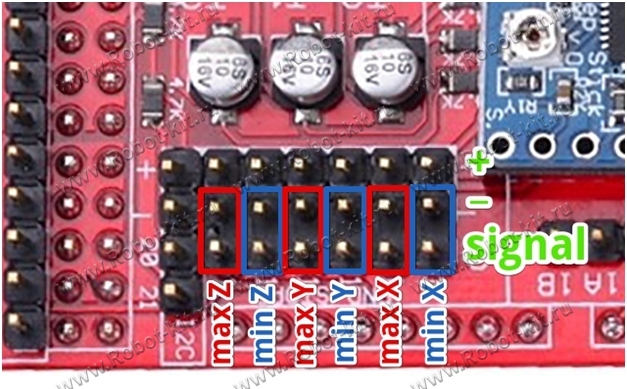
На плате ramps предусмотрено шесть разъемов для подключения концевых выключателей, их порядок следующий: X min, X max, Y min, Y max, Z min, Z max. Подключать концевики нужно соблюдая полярность. Если смотреть на разъемы концевиков со стороны разъемов питания RAMPS, то порядок пинов будет следующий: Signal, GND, +5 В.

Подключение термисторов RAMPS поддерживает три датчика температуры, разъемы для них подписаны — T0, T1, T2. В T0 подключают термистор хотэнда, а в T1 термистор нагревательного стола. Полярность у термисторов отсутствует. T2 служит для термистора второго хотэнда.

Подключение нагревательного стола и нагрева хотэнда
Разъемы для подключения нагревательных элементов обозначены D8, D9, D10. В D8 подключают нагревательный стол, а в D10 подключается нагрев хотэнда. В D9 подключают вентилятор для программной регулировки обдува печатающихся деталей, либо нагрев второго хотэнда (в зависимости от того, что указать в прошивке).
Подключение LCD дисплея
На плате Ramps есть специальный разъем для подключения дисплея, поэтому подключить любой LCD дисплей не составит труда.
Источник
Шилд RAMPS 1.4 подключение к Arduino Mega
Шилд RAMPS 1.4 подключение к Arduino Mega.
Рассмотрим подключение платы Shield-RAMPS-1.4 на примере 3D принтера Mendel90.
RAMPS 1.4 это шилд (надстройка) для Arduino Mega 2560. Ардуино преобразует G-коды в сигналы и управляет 3D принтером посредством силовой части — RAMPS 1.4.
Плата RAMPS 1.4 одевается поверх Arduino и все подключения, кроме USB, осуществляются через неё. Питание 12В на Arduino подаётся через RAMPS 1.4.
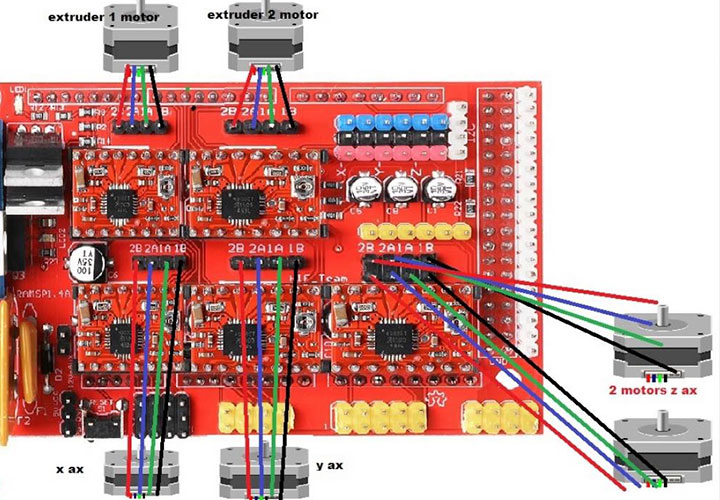
Двухэкструдерная схема подключения
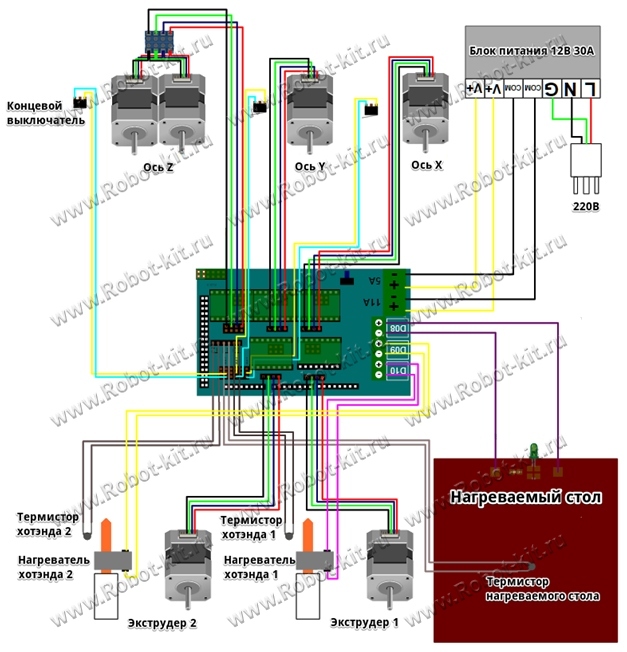
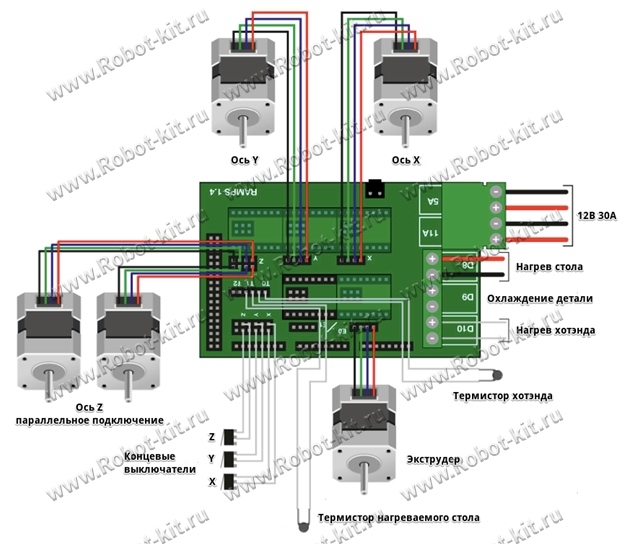
Схема подключения с одним экструдером
Обычно используют билинейные (четыре провода) шаговые двигатели на 1,7 А типоразмера Nema 17. Провода желательно свить в косички для защиты от наводок.
Шаговые двигатели для оси Z можно подключать двумя способами:
- Первый способ.
Параллельное подключение пары шаговых двигателей на одну ось Z — это когда штекер каждого шагового двигателя подключается к своему индивидуальному разъему на плате RAMPS 1.4.
Такой способ подключения шаговых двигателей для оси Z является стандартным подключением к плате RAMPS 1.4.
Следует заметить, что при параллельном (стандартном) подключении могут возникать проблемы с рассинхронизацией шаговых двигателей, если будет иметь место разница в сопротивлении обмоток у подключаемой пары шаговых двигателей. - Второй способ.
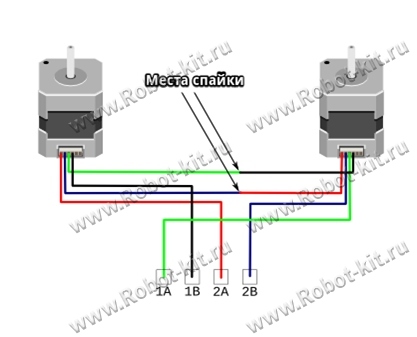
Второй способ это подключить шаговые двигатели последовательно одним штекером по схеме показанной ниже.
При таком последовательном подключении двух шаговых двигателей по оси Z проблем с рассогласованием пары движков уже не будет наблюдаться.
Питание на RAMPS 1.4 подаётся от блока питания 12В 30А.
Подключение концевых выключателей
На плате ramps предусмотрено шесть разъемов для подключения концевых выключателей, их порядок следующий: X min, X max, Y min, Y max, Z min, Z max. Подключать концевики нужно соблюдая полярность. Если смотреть на разъемы концевиков со стороны разъемов питания RAMPS, то порядок пинов будет следующий: Signal, GND, +5 В.
Подключение термисторов RAMPS поддерживает три датчика температуры, разъемы для них подписаны — T0, T1, T2. В T0 подключают термистор хотэнда, а в T1 термистор нагревательного стола. Полярность у термисторов отсутствует. T2 служит для термистора второго хотэнда.

На плату могут быть установлены драйверы шаговых двигателей типа A4988 с минимальным микрошагом 1/16 или Drv8825 с минимальным микрошагом 1/32
Прежде чем установить драйвера, необходимо выставить микрошаг драйвера, установив необходимую комбинацию джамперов, на разъеме, который находится под соответствующем драйвером.
Если используется драйвер A4988, то расположение перемычки будет таким:

Если используется драйвер Drv8825, то расположение перемычки будет таким:
Подключение нагревательного стола и нагрева хотэнда
Разъемы для подключения нагревательных элементов обозначены D8, D9, D10. В D8 подключают нагревательный стол, а в D10 подключается нагрев хотэнда. В D9 подключают вентилятор для программной регулировки обдува печатающихся деталей, либо нагрев второго хотэнда (в зависимости от того, что указать в прошивке).
Подключение LCD дисплея
На плате Ramps есть специальный разъем для подключения дисплея, поэтому подключить любой LCD дисплей не составит труда.
Шилд Shield-RAMPS-1.4 — одна из самых распространённых плат для сборки 3D принтеров.

Эта «материнская» плата позволит Вам без проблем коммутировать все комплектующие воедино.
Источник
Подключение Ramps 1.4 в 3d принтере
Ramps 1.4 — один из самых распространнеых шилдов для Arduino Mega. Как он обрел такую популярность? Все дело в том, что он является неотъемлемой частью в домашнем 3d принтере. Именно эта плата расширения позволяет подсоединить к универсальной платформе Arduino Mega 2560 все необходимые комплектующие Вашего устройства прототипирования. Это бюджетный вариант для сборки 3d принтера и настоящий момент именно такая категория принтеров наиболее популярная, так как в основном им пользуются для домашних нужд и печати в сфере робототехники. Цена Ramps 1.4 очень мала, что делает его незаменимым. Но у таких вещей есть свои нюансы и об основных этих аспектах мы поговорим в этой статье.
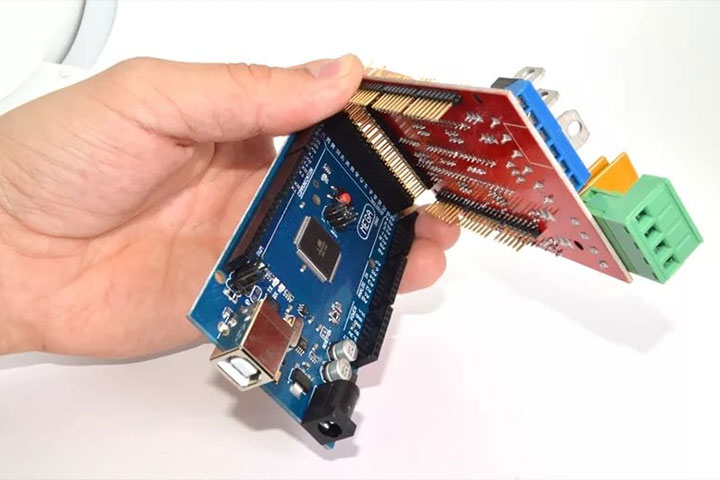
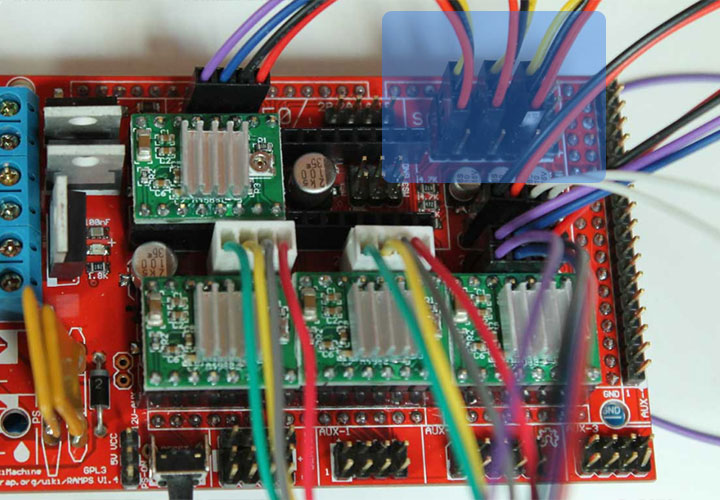
Как же подключать шилд Ramps и какова его распиновка? Сперва стоит соединить его с Вашей ардуинкой. Это очень просто и там нельзя ошибиться, просто втыкаем пины в штекеры разом, чтобы та полностью вошла в пазы. А вот далее начнутся манипуляции посложнее. В первую очередь нужно обратить внимание на то , что написано на плате расширения в ее центре: X, Y и Z. Под каждой из букв можно видеть 2 параллельные дорожки штекеров «мама». Именно туда вставляются драйверы управления шаговыми моторами. О их видах и характеристиках мы расскажем в другой статье, а пока будем вещать на примере самых надежных и дешевых А4988. Вставлять нужно именно так, как показано на картинке. Могут возникать трудности с их установкой, так как место для них весьма мало. Отдельно ставится драйвер (или два, в случае двух экструдеров) для управления шаговиком экструдера, проталкивающего филамент. Также, перед тем, как втыкать А4988, под ними есть 6 пинов, которые надо попарно соединить джамперами, которые идут в комплекте. Не забудьте это сделать, это очень важно.

Далее, соединяем провода питания обмоток с выходами около соответствующих драйверов на шилде. Стоит отметить, что их порядок весьма важен, нужно смотреть схему шагового мотора, который установлен на Ваш 3d принтер. С другой стороны, установить их весьма нетрудно, так как все равно в прошивке нужно будет указывать их последовательность. Существует много сборок, где все понятно написано, какие провода куда втыкать в зависимости от версии прошивки. Поэтому здесь нужна внимательность и не более.
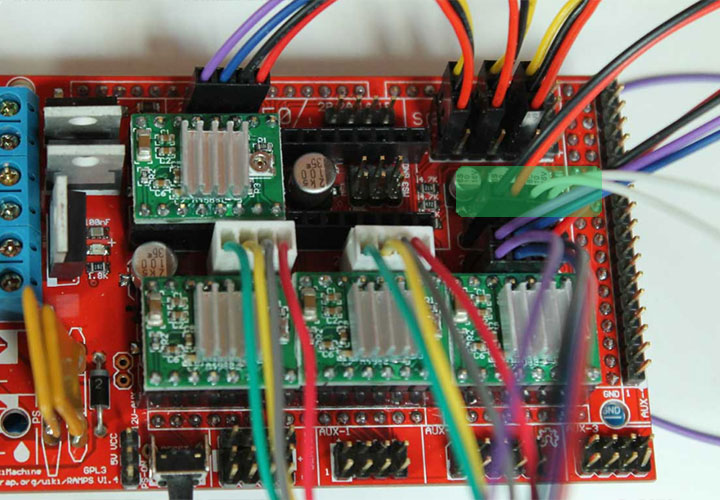
Далее идет подключение концевых выключателей, они же стоппреы. Концевиков у нас 3, на каждую ость. Как и куда их ставить на Зд принтере мы уже писали здесь и тут. Они подсоединяются в слоты в верхнем правом углу шилда.
Следующим шагом идет подключение проводом термодатчиков стола и сопла. Они подключаются к контактам Т0, Т1 и Т2, в любые из них — все зависит от настроек прошивки. Если хотя бы с одного не будет идти информация по какой либо причине, и на экране будет не определена температура или стоять 0 — в этом случае принтер не даст зайти в меня и работать не будет. Поэтому проверьте на исправность термопар, правильность установки.
Следующим и завершающим элементом статьи будет рассказ о силовой части ramp 1.4 и о ее нюансах. Начнем с того, что у нас есть 2 входа на плату с блока питания через 4 коннектора в виде зеленого четырех канального терминала. Сразу скажем, что это крайне ненадежный элемент и очень часто он плавится или даже воспламеняется. Это очень опасно, если Вы оставляете печатать принтер на ночь и не следите за ним. Поэтому от блока питания тянем 4 достаточно толстых провода. Выпаиваем зеленый терминал из платы расширения большим паяльником (одновременно все контакты нужно прогреть) или феном и подсоединяем напрямую питание в шилд. Каждый из двух каналов питания подает ток на свою часть синего терминала, имеющего по 3 слота. Одна его часть служит для обдува сопла, другая — для нагрева экструдера, третья — разогревает стол. Опять же, нужно смотреть настройку прошивки. Поэтому в один канал подсоединяем провода от экструдера, в другой — вентилятора обдува (см. рисунок ниже), а в третий — провода от нагревателя стола.
В качестве совета можно предложить выпаять один из двух желтых плавких предохранителей — самый большой. Его нужно заменить на еще больший, так как тесты показывают, что по своим характеристикам предыдущий сильно проигрывает. На старых моделях стоял правильный предохранитель, но потом по неизвестным причинам его заменили. Ну и последним и весьма важным советом будет предложение поставить вентилятор на ramp и блоки питания. Дело в том, что в процесс длительной печати плата нагревается, а особенно этому эффекту поддаются драйверы шаговых моторов, которые могут выйти из строя из-за этого или начнут сбивать положение экструдера в процессе печати на каком нибудь слое и часть модели съедет. Поэтому не ленитесь и поставьте такое охлаждение напрямую через блок питания.
Источник
Помогите с подключением двигателей на Ramps 1.4
Приветствую всех! Помогите, пожалуйста с подключением двигателей по оси Z на Ramps 1.4.
Суть проблемы в том, что у меня два двигателя Nema 17 на 1.7A будет установлено на ось Z.Судя по всему, если их подключать в один драйвер, то тока никак не хватит. Есть у меня мысля по поводу подключения одного двигателя в драйвер оси Z а второй к свободному драйверу второго экструдера.Но каким образом это сделать??Я предполагаю что в прошивке Marin нужно раскоментить dual motors z??тогда в этом случае куда как коннектить движки?Заранее благодарю за помощь!))
Популярные вопросы
снос деталей при печати
Доброго времени суток. В интернете найти ответ невышло. понять в чем косяк я немогу и соответсвенно-есть теории.
При печати принетр к.
POM не зашел?
Доброго дня всем 3д маньякам!Расскажите, кто в теме, почему этот пластик не получил широкое распространение?
По характеристикам не пл.
Чем 3D принтер отличается от 3D плоттера?
На занятиях по моделированию один школьник спросил — Чем 3D принтер отличается от 3D плоттера и что лучше для нови.
Ответы
По идее на втором экструдере появится ваш второй z
Как понять ‘по идее’?Нужно прошивку как минимум настроить и провода в верные разъемы подключить
Метод тыка никто не отменял
Там все немного сложнее , поищу свою старую запись и поделюсь с вами , сам на это массу времени убил и паралелил двигуны как воветовали и последовательно подключал , но все не то , а рабочее решение есть и я поделюсь
[COLOR=#444444]В оригинале там вот так у вас [/COLOR]
// Motors
#define X_STEP_PIN 54
#define X_DIR_PIN 55
#define X_ENABLE_PIN 38
#define Y_STEP_PIN 60
#define Y_DIR_PIN 61
#define Y_ENABLE_PIN 56
#define Z_STEP_PIN 46
#define Z_DIR_PIN 48
#define Z_ENABLE_PIN 62
#define E0_STEP_PIN 26
#define E0_DIR_PIN 28
#define E0_ENABLE_PIN 24
#define E1_STEP_PIN 36
#define E1_DIR_PIN 34
#define E1_ENABLE_PIN 30
А по идее должно быть так
// Motors
#define X_STEP_PIN 54
#define X_DIR_PIN 55
#define X_ENABLE_PIN 38
#define Y_STEP_PIN 60
#define Y_DIR_PIN 61
#define Y_ENABLE_PIN 56
#define Z_STEP_PIN 46
#define Z_DIR_PIN 48
#define Z_ENABLE_PIN 62
#define E0_STEP_PIN 26
#define E0_DIR_PIN 28
#define E0_ENABLE_PIN 24
#define Z2_STEP_PIN 36
#define Z2_DIR_PIN 34
#define Z2_ENABLE_PIN 30
но только надо раскоментить в прошивке строку о том , что используете второй мотор оси. Лично у меня заработало после этого , но потом ramps сгорел и я благополучно купил ruramps поставил один двигатель на ось Z nema23 с внешним драйвером и навсегда попрощался с этим геморроем , собрал прошивку на repetier и все . И к стати на repetier очень удобный конфигуратор и можно указать прям в нем что у вас два двигателя на ось и показать на какие порты его перекинуть. Желаю удачи
Источник